Zhejiang Normal University Fudan University
Visual object tracking is basically formulated as target classification and bounding box estimation. Recent anchor-free Siamese trackers rely on predicting the distances to four sides for efficient regression but fail to estimate accurate bounding box in complex scenes. We argue that these approaches lack a clear probabilistic explanation, so it is desirable to model the uncertainty and ambiguity representation of target estimation. To address this issue, this paper presents an Uncertainty-Aware Siamese Tracker (UAST) by developing a novel distribution-based regression formulation with localization uncertainty. We exploit regression vectors to directly represent the discretized probability distribution for four offsets of boxes, which is general, flexible and informative. Based on the resulting distributed representation, our method is able to provide a probabilistic value of uncertainty. Furthermore, considering the high correlation between the uncertainty and regression accuracy, we propose to learn a joint representation head of classification and localization quality for reliable tracking, which also avoids the inconsistency of classification and quality estimation between training and inference. Extensive experiments on several challenging tracking benchmarks demonstrate the effectiveness of UAST and its superiority over other Siamese trackers.
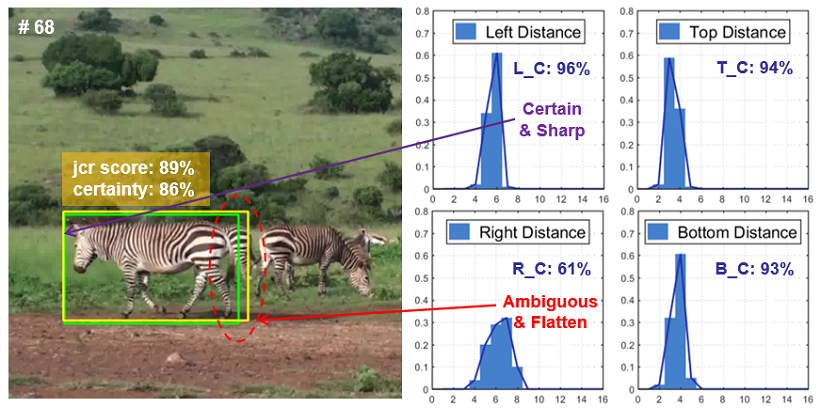
Figure 1. A representative example of the proposed uncertainty-aware tracking. Our distribution-based regression (yellow) can reflect the uncertainty information of localization prediction.
We show representative quantitative results of UAST, DiMP and SiamFC++, as shown in Figure 2.
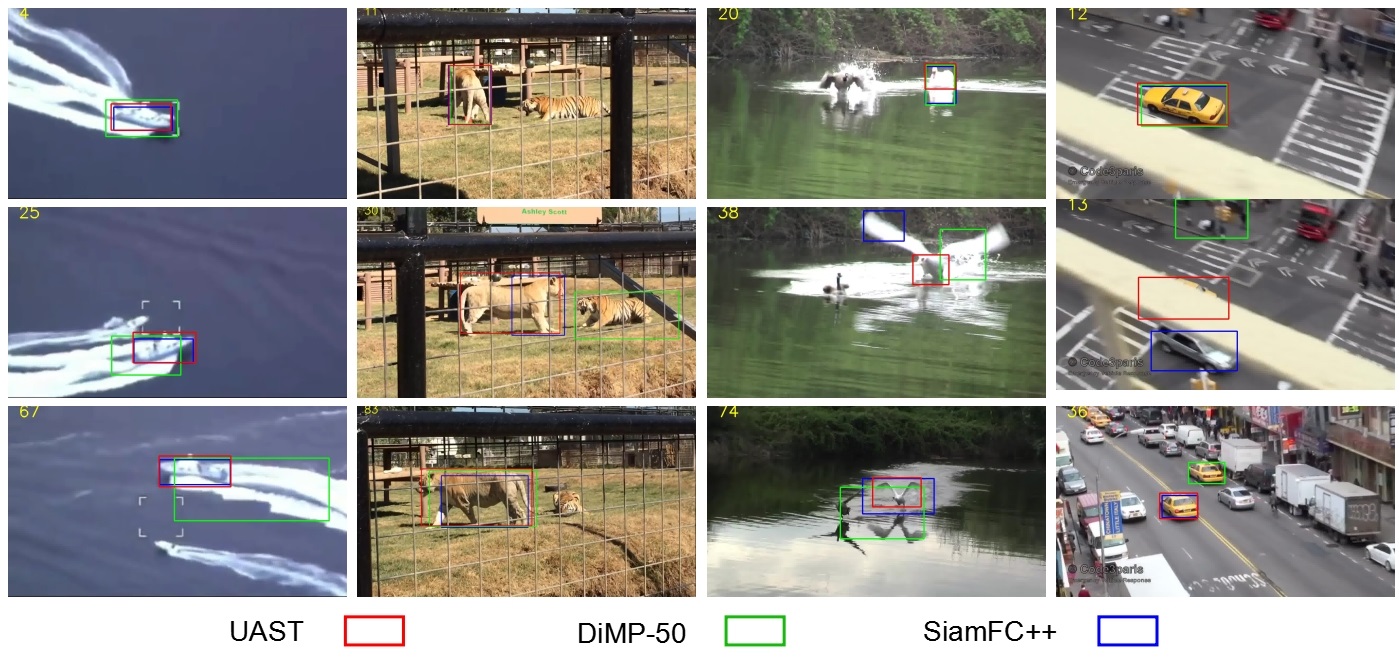
Figure 2. This comparison demonstrates that the proposed distributed regression formulation is more effective because our method provides a clear interpretation of the boxes.
|
title={UAST: Uncertainty-Aware Siamese Tracking}, author={Zhang, Dawei and Fu, Yanwei and Zheng, Zhonglong}, booktitle={Proceedings of the 39th International Conference on Machine Learning (ICML)}, pages={26161--26175}, year={2022} } |
Dawei Zhang, Zhonglong Zheng, and Yanwei Fu,
"UAST: Uncertainty-Aware Siamese Tracking,"
International Conference on Machine Learning (ICML), 2022.
Contact: If you have any questions, please contact me by sending e-mail to davidzhang@zjnu.edu.cn